Filter Aiding
Settings controlling the navigation filter and behaviour are configured on this page. The page is divided into a simple and Advanced section, to display the Advanced section press the “Advanced” Button.
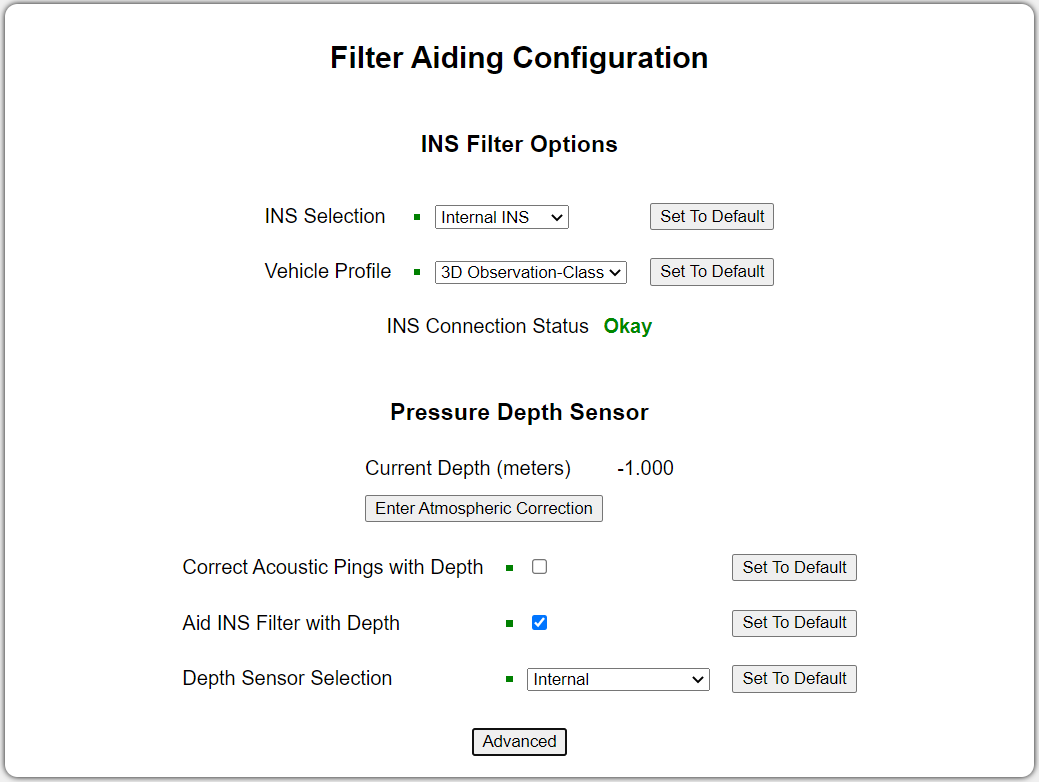
Filter Aiding Page
INS Filter Options
INS filter options allow configuration of what INS is used in Subsonus, this includes the Internal INS, a Fixed Position or an External Advanced Navigation INS.
The Internal INS allows configuration of a Vehicle Profile. This describes to the Navigation filter the expected operating conditions of the device allowing constraints to be placed on the filter for better performance. For a full list of available vehicle profiles, see Vehicle Types
The Fixed Position allows direct entry of a position and heading as well as optionally a roll and pitch. this is most useful for a surface unit that is mounted to a barge.
Pressure Depth Sensor
The Pressure Depth sensor in Subsonus can be used to provide Position and Velocity correction to acoustic positions as well as velocity constraints for vertical movement to the navigation filter. This is more important for the subsea device than the surface device
In order to be used an offset must be provided for local atmospheric conditions. If the offset is set to zero the pressure sensor will be uninitialised.
The corrected sensor reading is calculated by subtracting the offset from the raw sensor value. The corrected sensor reading value should be zero when Subsonus is out of the water.
Advanced INS Controls
Sensor ranges
The operating range of some sensors contained in the internal INS can be configured, in most operating conditions for Subsonus the default settings are appropriate and should not be changed.
Magnetic Heading
Magnetic heading can be disabled in this section, in the default, automatic, configuration it will be used only when there is no better heading source available.
Manual Position and Heading
The INS Filter can be manually initialised with a position and heading using the input fields in this section. This can be used to set a datum, for example, if the INS is malfunctioning. Position and Heading can also be manually set for a fixed position Subsonus, for example, if the surface Subsonus unit was mounted to a Jetty. Manual initialisation should not be used in normal operation.
INS Filter reset
The INS filter can be re-initialised with the “Reset INS Filter” button.